

この記事は当方が初めてACサーボモーターを動かす事に成功した体験記です。ど素人があれこれ悪戦苦闘しながら希望する速度制御になったので細かい設定等を忘れないように備忘録として綴っておきます。同じようなACサーボモーター初心者さんの参考になれば幸いです。Servomotor Test run
制御コネクタ50ピン配線&アナログ制御の構築 その1
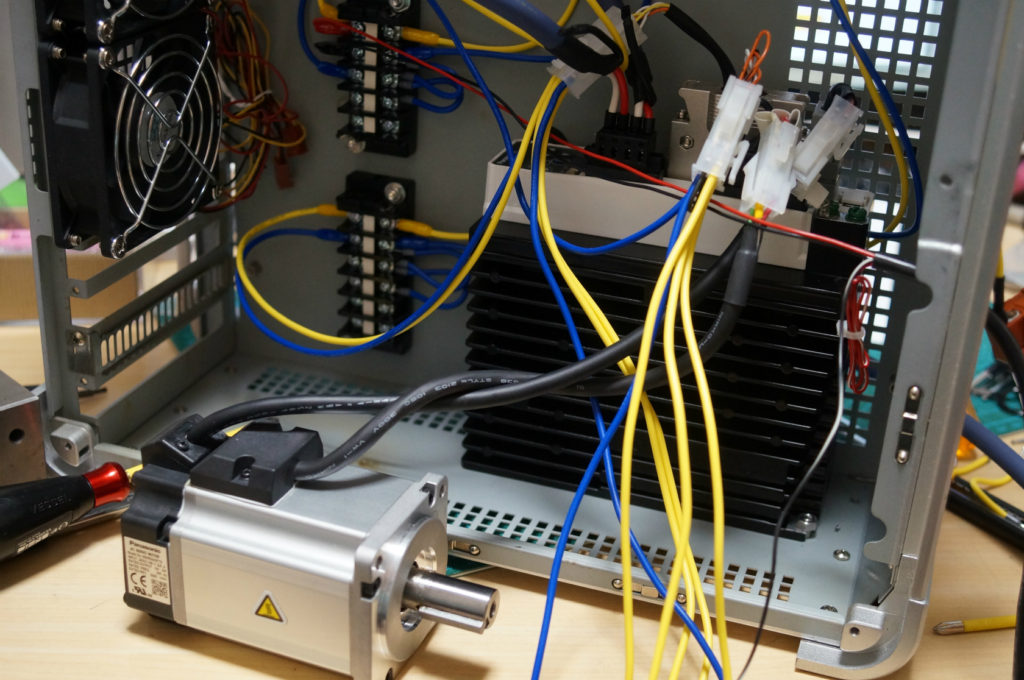
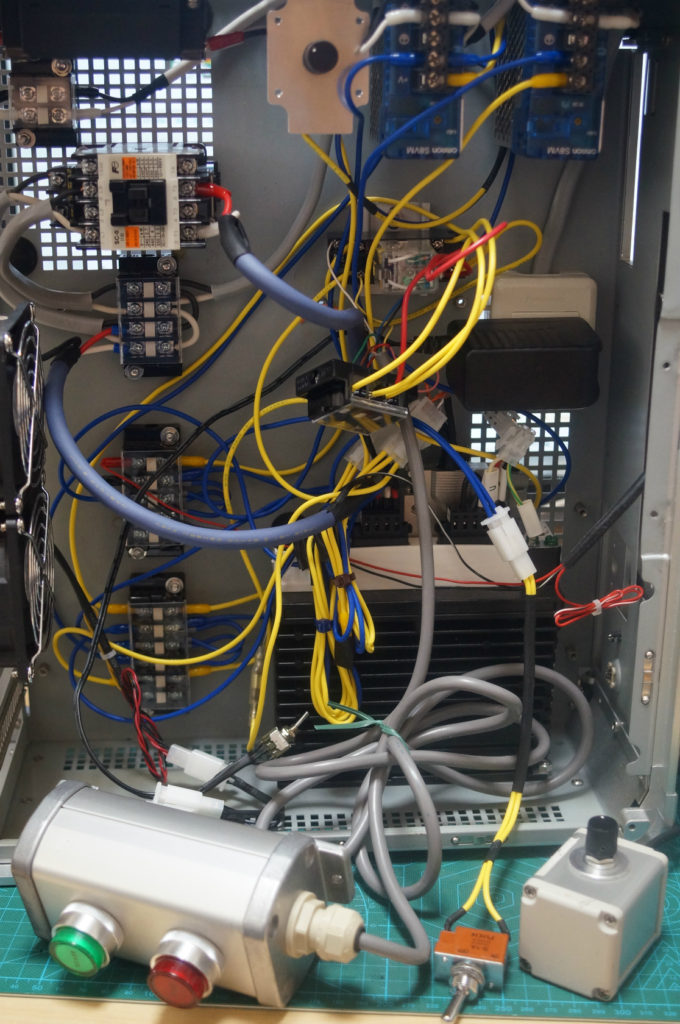
アナログコントロールのスイッチ類を取り付けて行きます。その前に、サーボアンプに入力するI/Oポート50ピンを接続しなければなりません。コネクターにはんだ付けする間隔が狭いので慎重にはんだ付けしました。

10Vのラインを接続。可変抵抗器(VR)で回転数を調整するNo.14(SPR/TRQR)とNo.15(GND)。
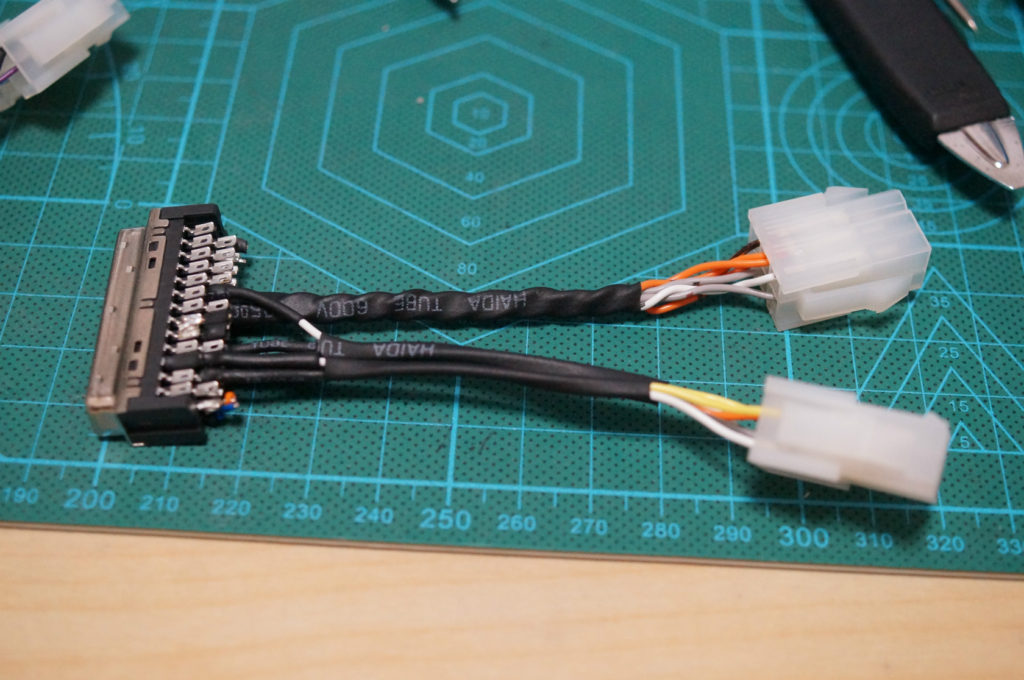
24Vのラインを接続。当初の接続はNo.7(COM+)、No29(SRV-ON)、No.31(A-CLR)、No.9(CCWL)、No.8(CWL)、No.41(COM-)です。後にNo.26(ZEROSPD)を接続。

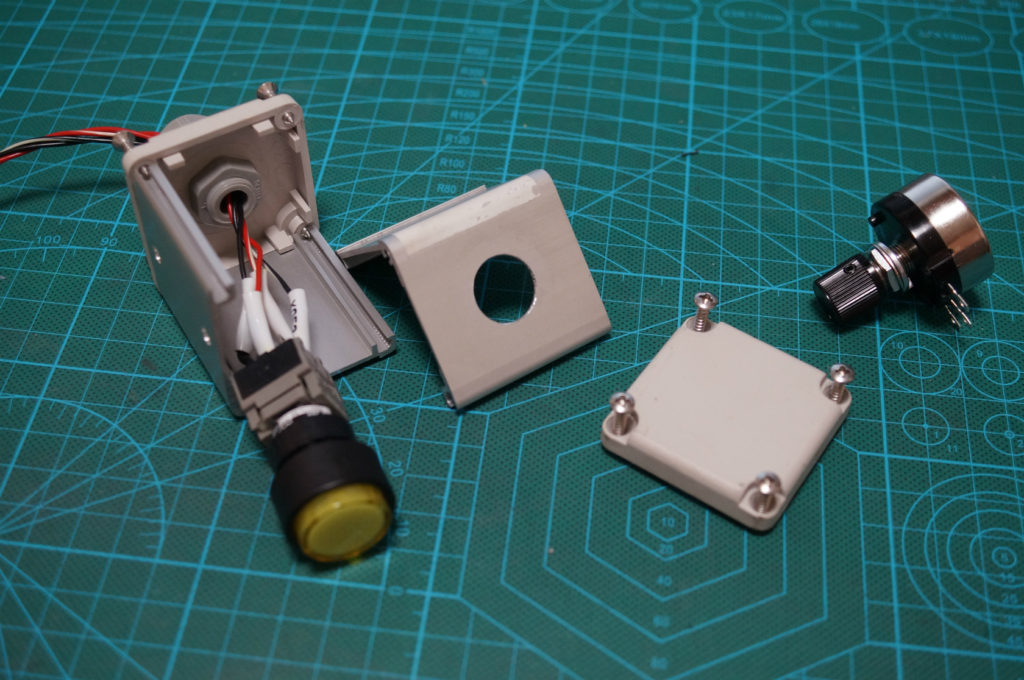
手元でスピードをコントロールできるようにセパレートにしました。中古のアルミスイッチBOXが当方のジャンク部品箱に入っていたので、それを再利用しました。
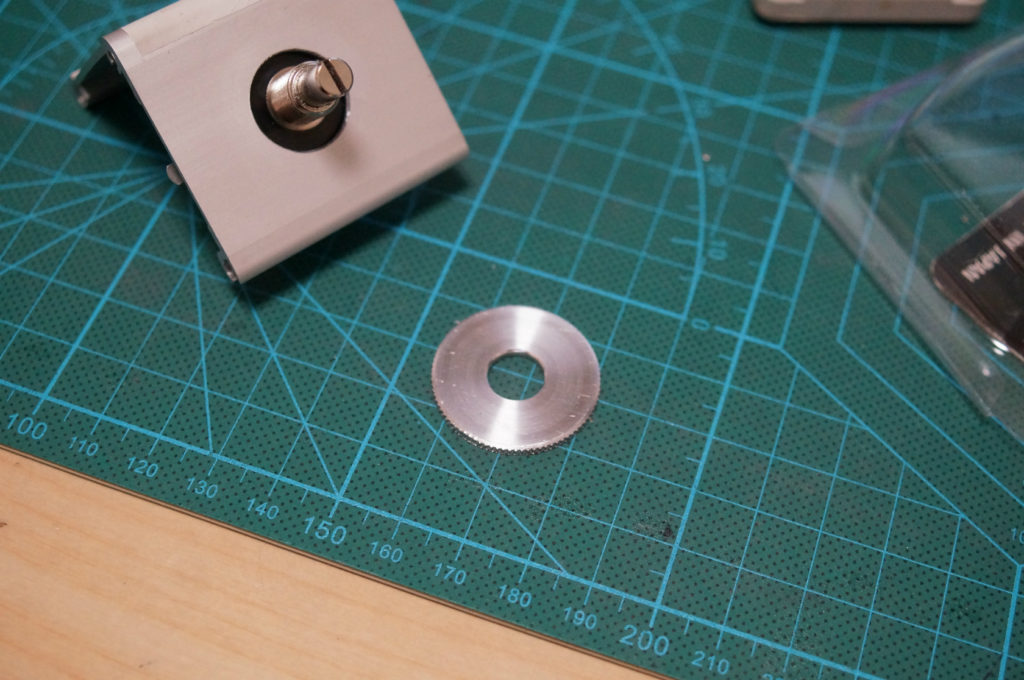
スイッチの穴が大きいので廃材を使って旋盤でカラーを削り出しました。

運よくピッタリ収まるサイズでした。

BOXを組み立てるとこんな感じです。

既製品(サトーパーツ:モールドツマミ K-8075 )のつまみノブを付けて完成!

制御盤内に取り付けるVRの取付けプレートは廃材(仕掛け巻きカウンター台座)を使用。

こちらは穴を大きくするだけの加工でできました。(Φ12mm)
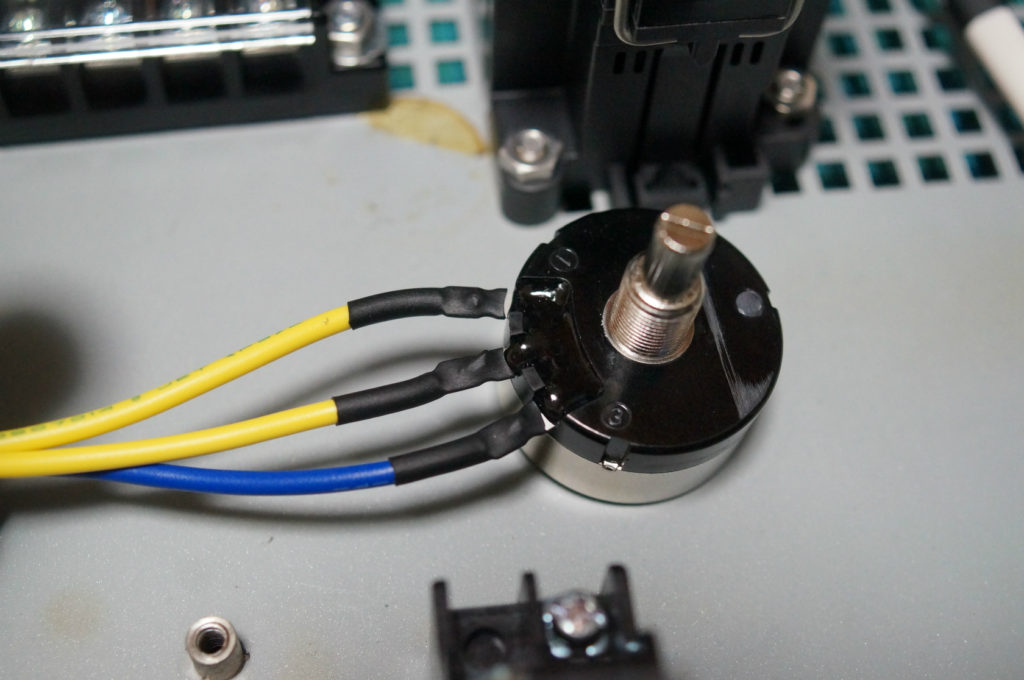
可変抵抗器の結線は半田付けです。きっちり絶縁処理もしました。
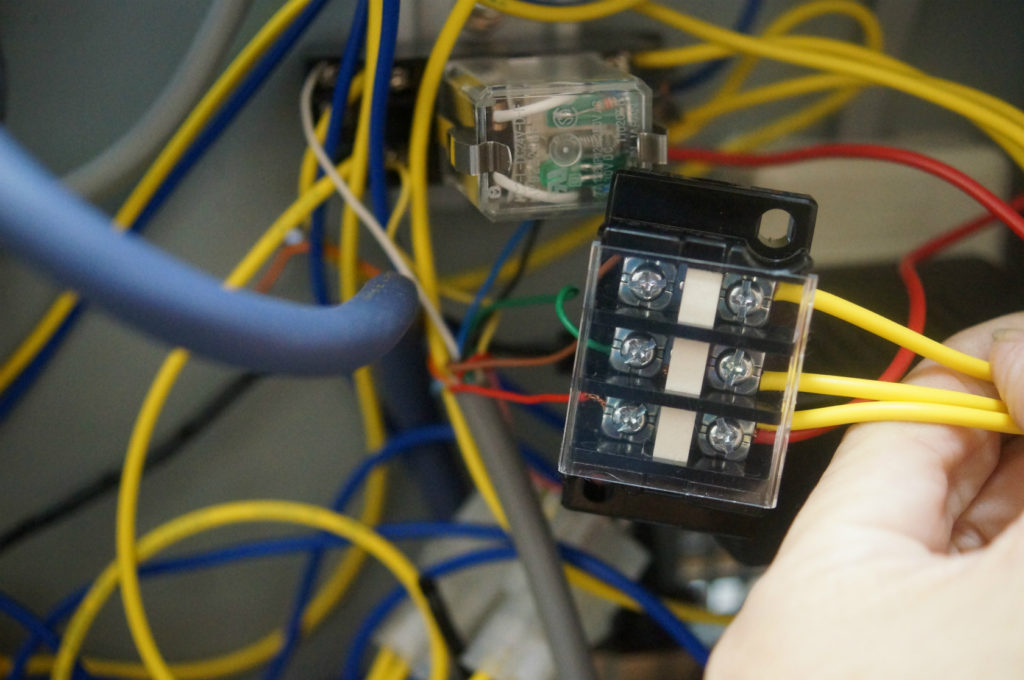
10V電源からのアナログコントロールスイッチ類を取り付けます。配線がごちゃごちゃなので端子台を使いました。
10Vでの正転・逆転スイッチ失敗!仕様変更~制御パラメーターでの制御
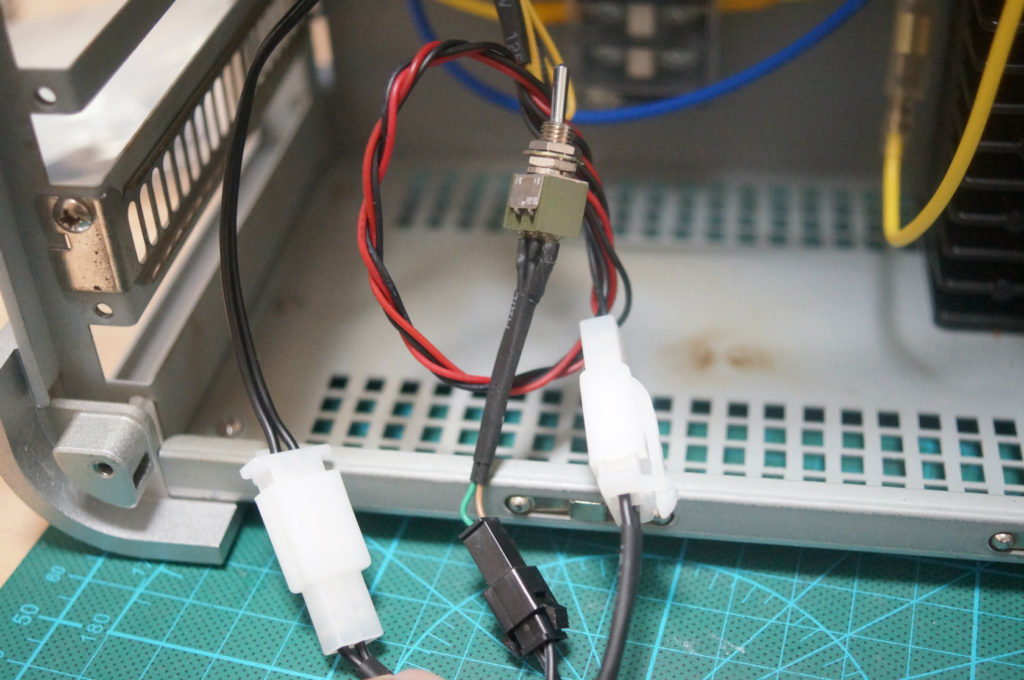
トグルスイッチ2P(単極単投)とリレー(1c)でCW、CCWを切り替えようと10V制御で計画していました。しかし単純にNo.16(CCWTL/TRQR)、No.18(CWTL)とNo17(GND)に接続しただけでは切り替えができませんでした。CW方向の0V~-10Vのマイナス電圧をよく理解しておらず単に+10Vを印加していたのが原因だと後々気付きました。
トグルスイッチでCW、CCWを切り替えるには2極双投のスイッチ(6P)のスイッチが必要!!イメージとしては電流の流れを変える事によって切替をする。

トグルスイッチ6P:双極双投(2回路2接点)の手持ちがなかったので購入しようかと思いましたがパラメーターの設定をいろいろ調べていたらパラメーター設定で切り替えできる事が判明しました。
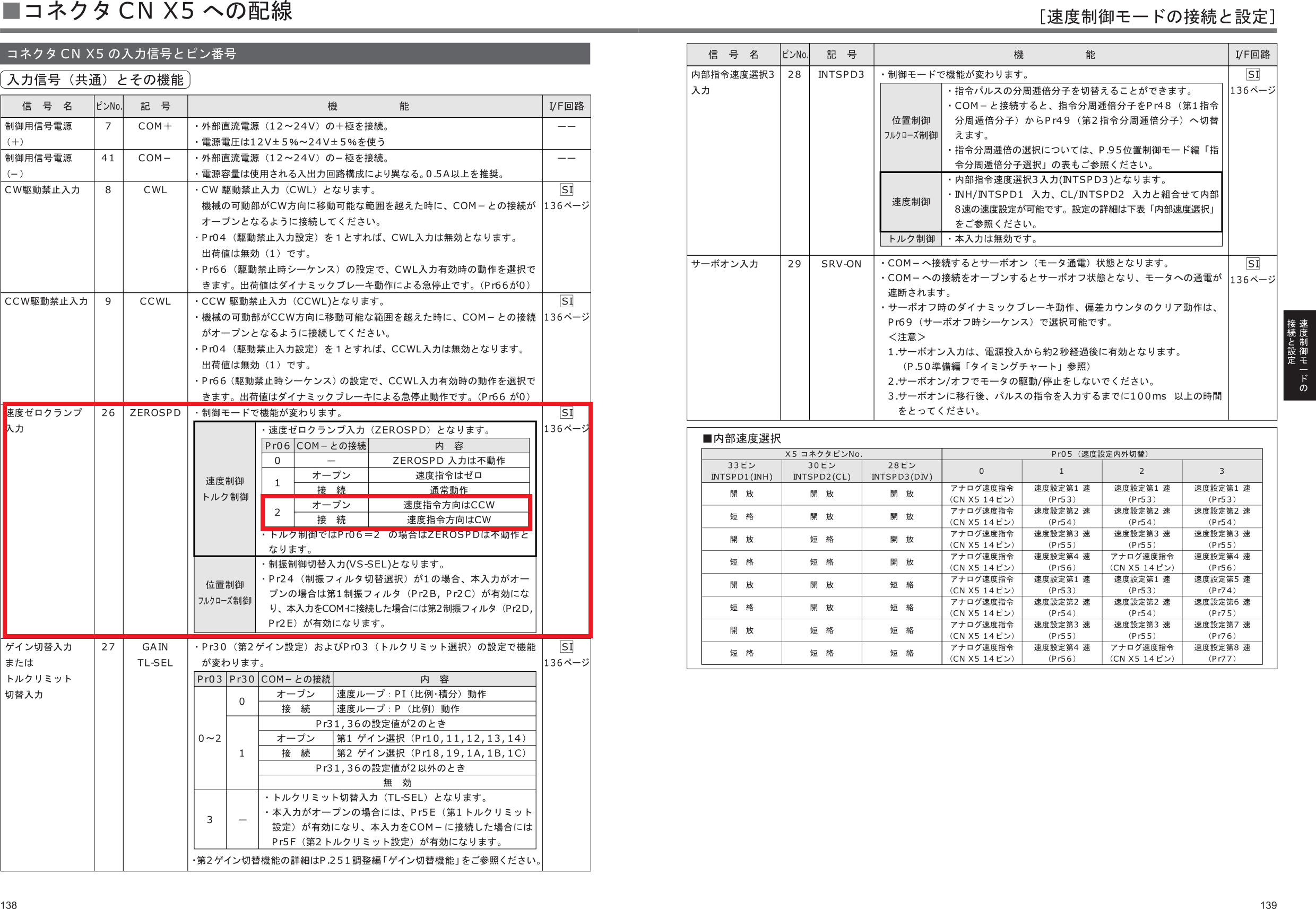
パラメーターPr6の「速度ゼロクランプ入力」で2に設定します。これでNo.26(ZEROSPD)とNo.41(COM-)との接続(トグルスイッチON-OFF)で動作確認が出来ました。
24Vの制御でトグルスイッチのON/OFFで切り替え可能ですので配線もスマートに出来ます。最初からこのパラメーターで計画すれば良かったです。
制御BOXにハンドルを取り付ける
制御盤を作る過程で箱を縦にしたり横にしたりとするのが頻繁にありその都度、持ちづらさを感じていたので持ち手(ハンドル)を取り付ける事にしました。

基本的にPCケースを縦にして使うので上部に2箇所取り付ける。

ハンドルは樹脂ハンドル(ハンドルグリップMHG-117-BK)を使用しました。取り付けはM6ボルト&ナット。

かなり持ちやすくなりました。有ると無いでは雲泥の差です。
制御コネクタ50ピン配線&アナログ制御の構築 その2
10Vのスピードコントローラーを端子台に取り付けます。

次にサーボモーターのON/OFFスイッチを取り付けました。どこに付けたら良いのか素人なのでよく分かりません。

とりあえず制御24Vの電流をON/OFFすることでモーター電源制御としました。
Myジャンク箱にON/OFFのスイッチボックス&スイッチがあったのでこれを流用します。
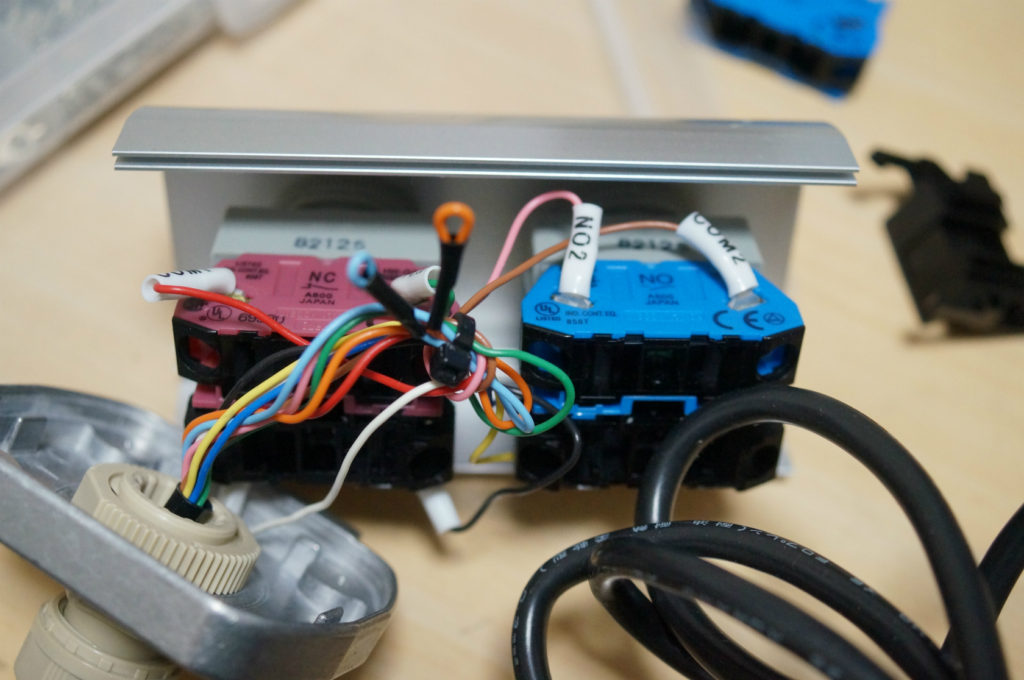
このスイッチボックスのスイッチはOFF側もNO接点だったのでIDECのNC接点(HW-G01)を購入し付け替えました。
このスイッチボックスを構築するにはリレーを使った自己保持回路を組む必要があり、まったくやり方が分かりませんでした。
第二種電気工事士の試験勉強程度の知識では自己保持回路は脳にインプットされていないので参考書を
買って極少々勉強しました。ネット情報と本で自己保持回路を少々勉強して実際に配線してみたらうまく出来上がりました。
ちなみに買った本は「基本からわかるシーケンス制御 カラー徹底図解」です。
写真が沢山あってなかなか分かりやすい?ですが自己保持回路あたりはシーケンス図しか載っておらず実際の実例配線図なんかもあればもっと分かりやすかったと思います。その辺はネット情報の方が初心者には分かりやすいですね。
Panasonic :HC2-L-DC24V-D-F(2C)
このスイッチBOXでモータのON-OFFが可能になりました。
パソコン12Vファンを配線。 電源はアダプターから・・・
パソコンに付いていたファンを有効利用して排熱をしようと思いました。

この制御BOXがどの位の熱を持つか分かりませんが一応付けて置きます。
パソコンのファンは困ったことに12V。既存の電源から12Vを取り出すとなるとまた大変なのです!

Myジャンクボックスから外付けHDDの12Vアダプターを発見したのでこれを使うことにした。
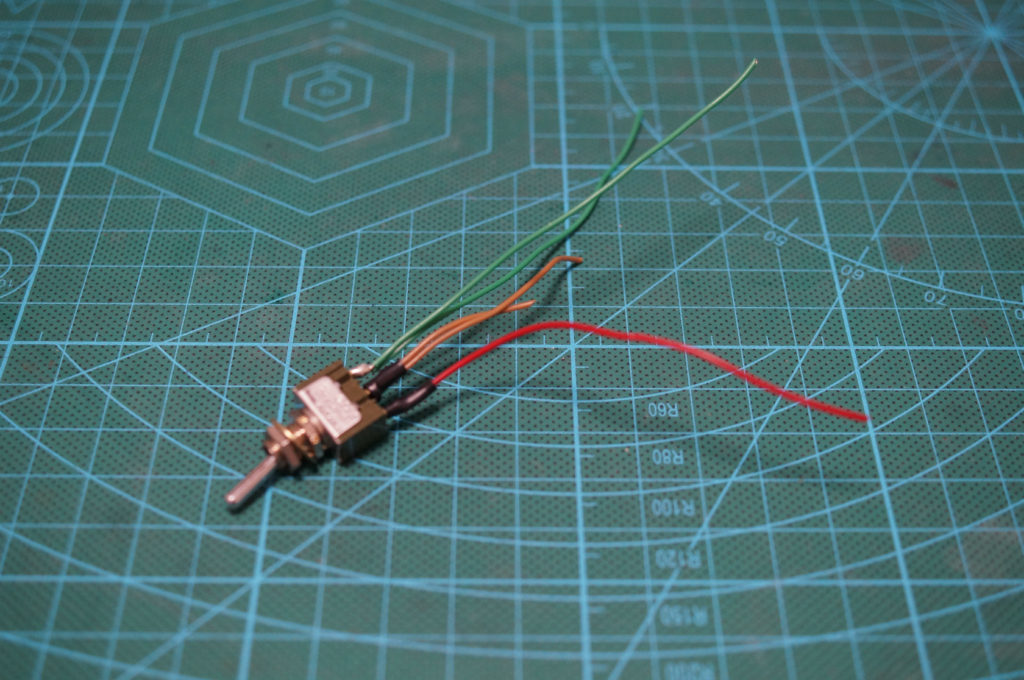
必要の無い機器から小型トグルスイッチを外して再利用しました。
これでON-OFF可能になりました。100Vの電源がアンプに近いのでノイズの影響が懸念されますがどうなんでしょう??
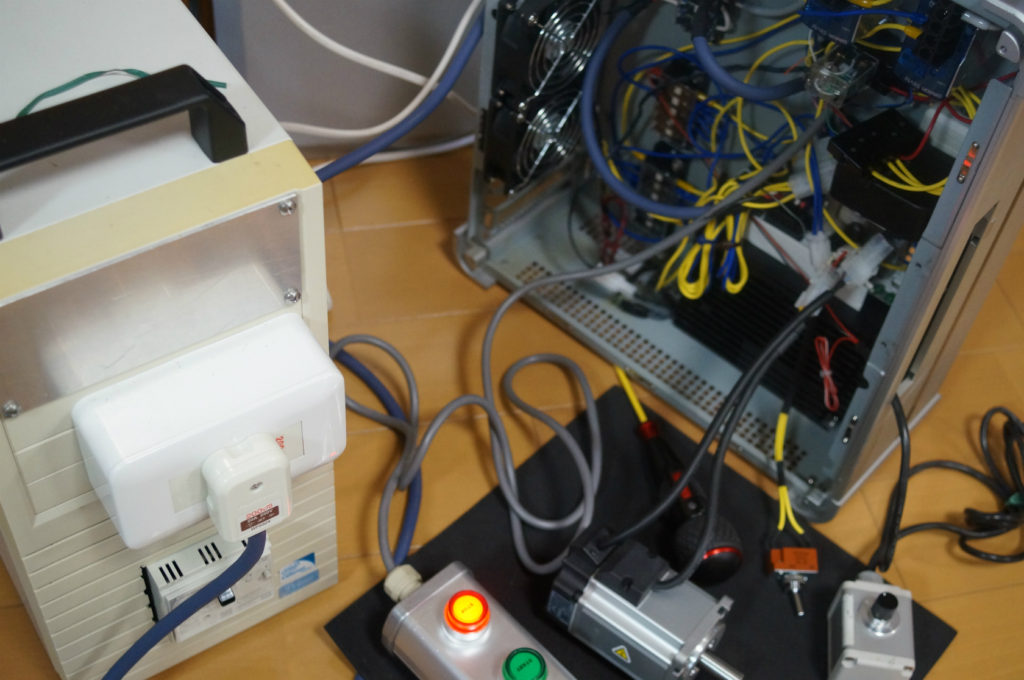
仮完成!!試運転 Servomotor Test run
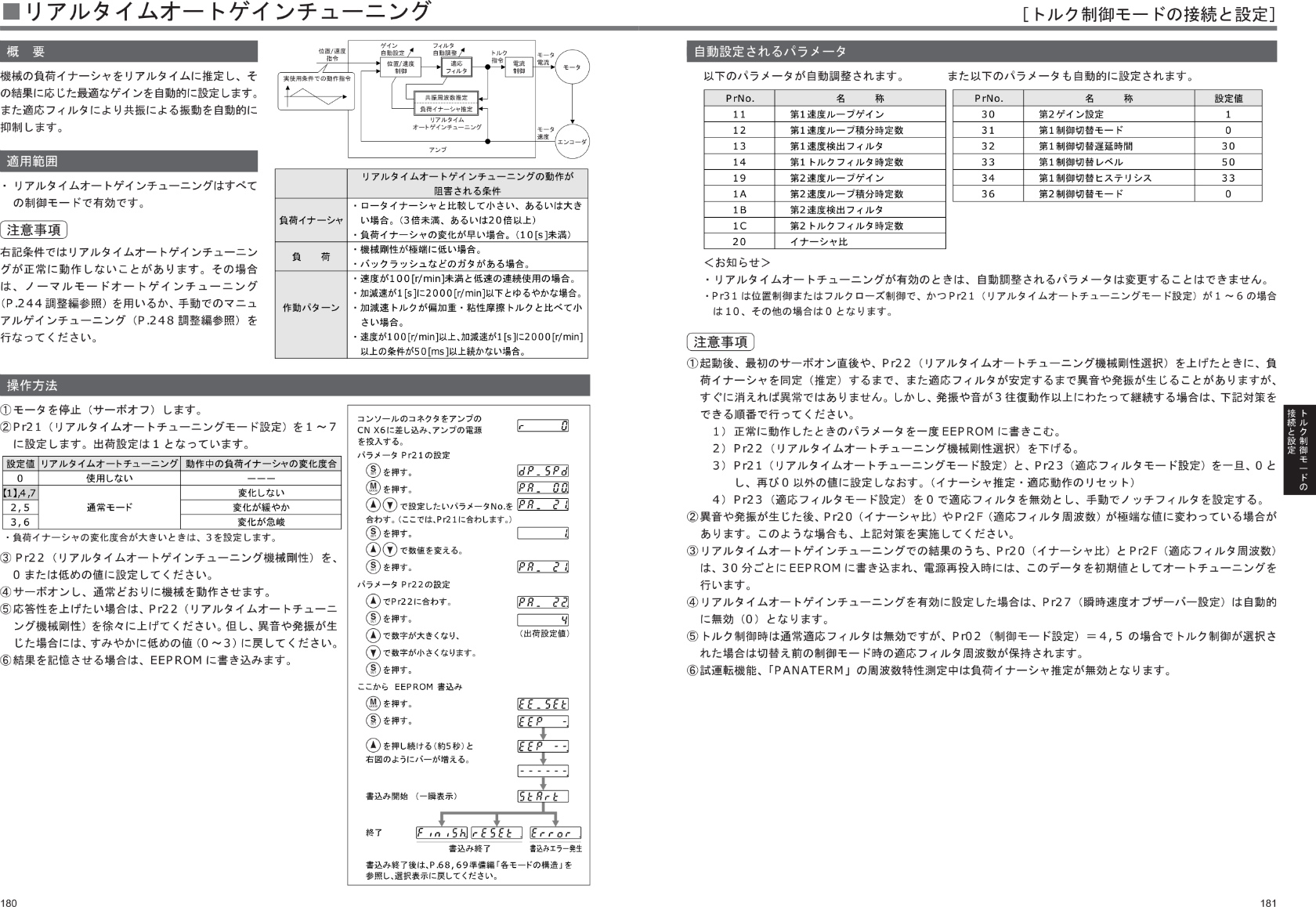
各種パラメーターを設定後、リアルタイムオートゲインチューニング実行、試験運転しました。
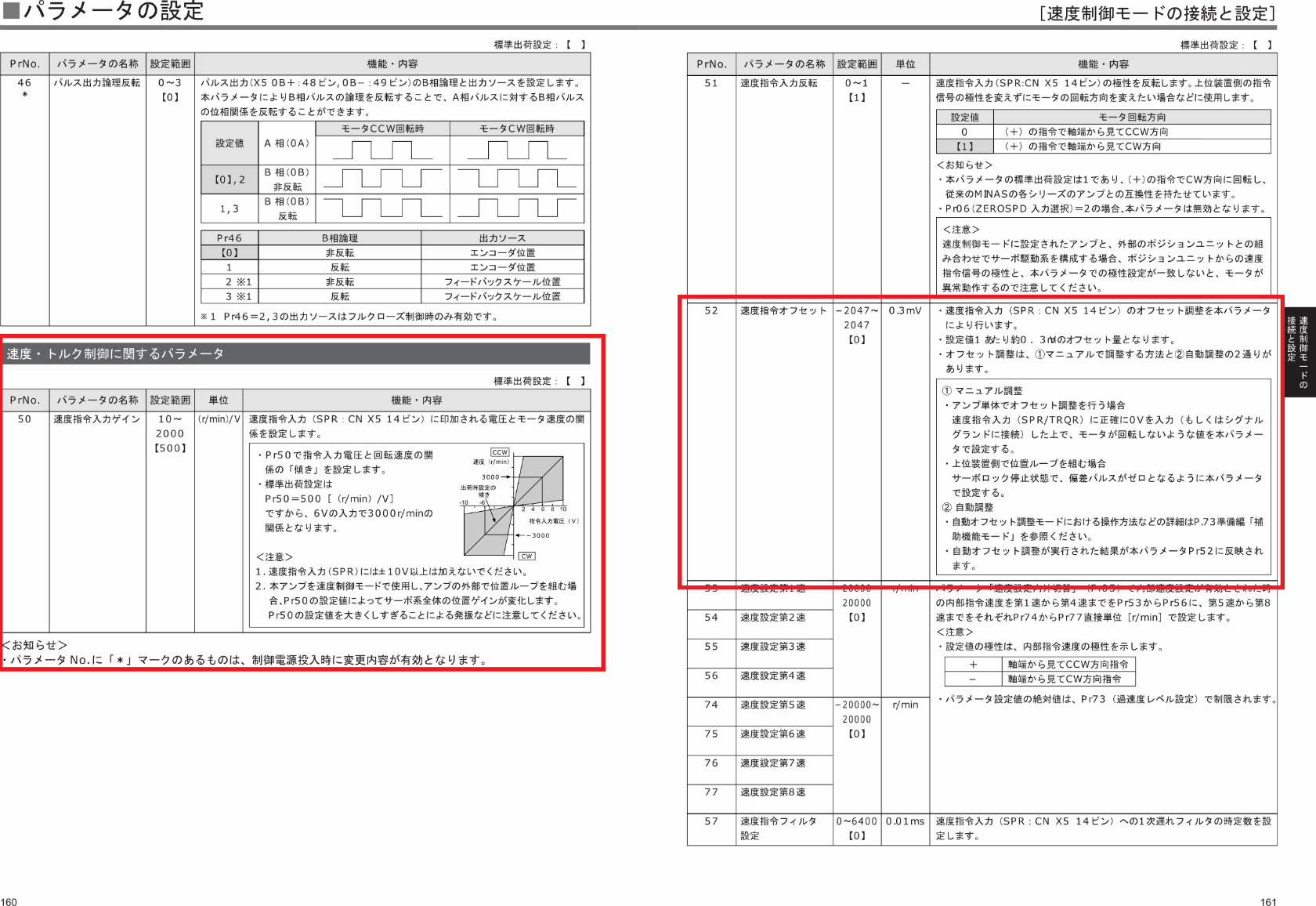
・速度指令入力ゲイン Pr.50 設定値<310(r/min)/V>
・速度指令オフセット Pr.52 設定値<-7mv>
とりあえず回転数計測器で回転数をチェックしましたが、本体の表示と計測器がまったく同じ数字になりましたのでこれでOKとします。
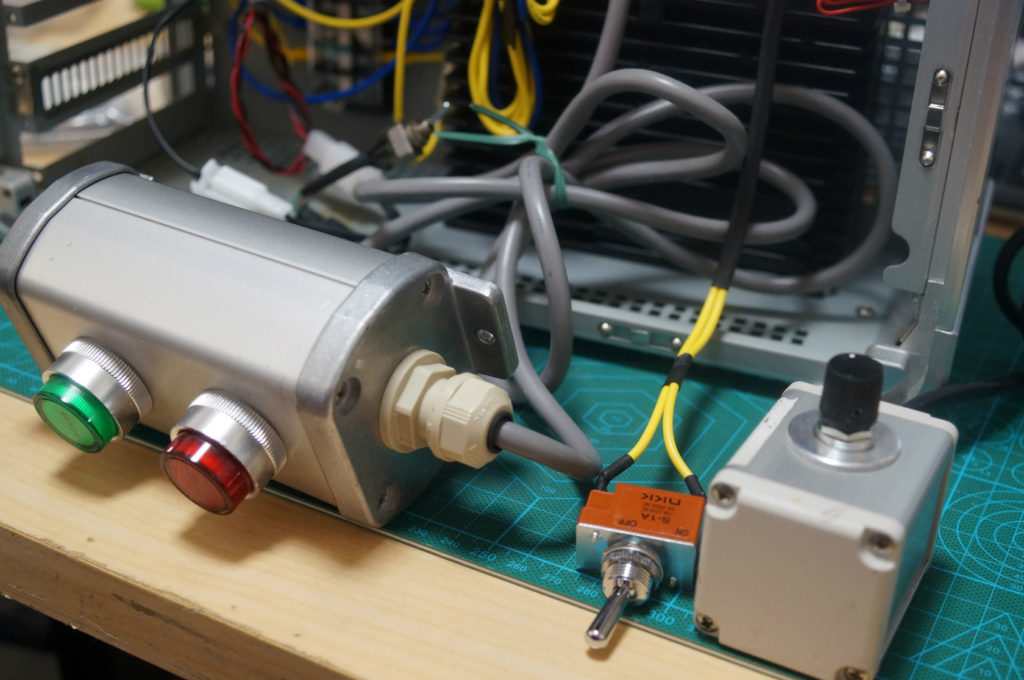
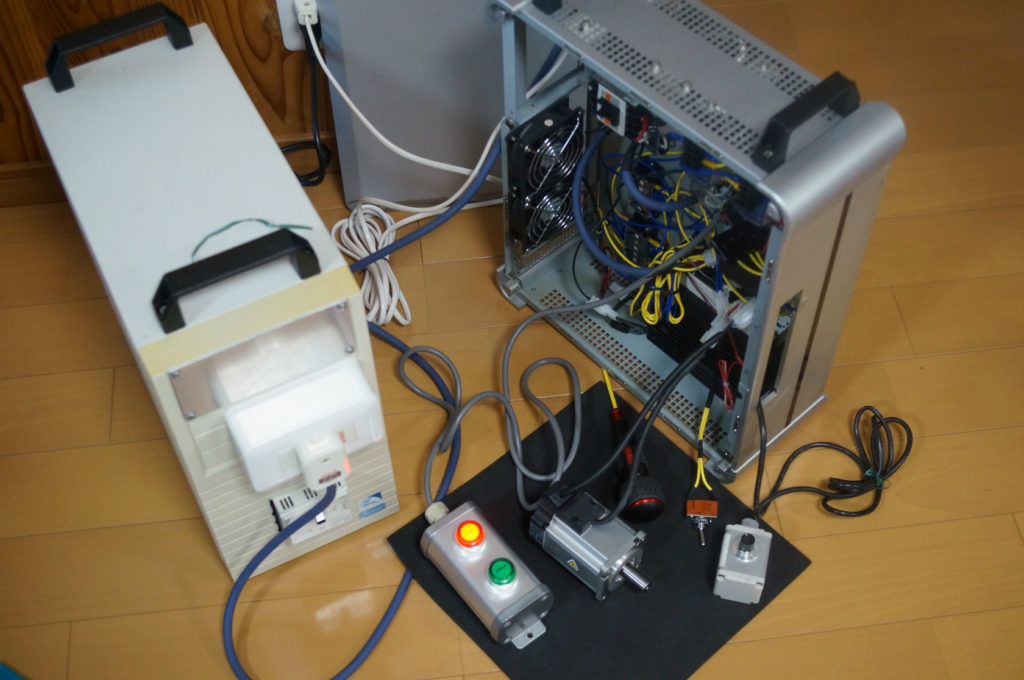

スイッチ類(CW/CCW切替を除く)をセパレート型にしているので取り回しが良いです。
取り合えず試運転成功ですが、問題が一つ発生しています。
<今後の問題点>
可変抵抗器(VR)が0Vでもモーターが微動する現象が続いております。上記の速度指令オフセット Pr.52を設定しても解決には至ってはおりません。微弱なノイズのせいなのか可変抵抗器(VR)の性能なのか今後の課題です。一先ずは制御電源ON-OFFスイッチを設けたのでモータOFF時はこれを使用すれば問題ありません。
<今後の作業メモ>
- 制御BOXの仕上げ(PCスロットカバー取り付け)
- スイッチ類を取り付け固定
- モーター配線の延長
- ノイズ対策
- 緊急停止ボタン(エマージェンシー スイッチ)取り付け
上記は今後また記事にしたいと思います。
サーボーモーター試運転 Servomotor Test run YouTube
Part1へ戻る
にほんブログ村


コメント