

この記事は当方が初めてACサーボモーターを動かす事に成功した体験記です。ど素人があれこれ悪戦苦闘しながら希望する速度制御になったので細かい設定等を忘れないように備忘録として綴っておきます。同じようなACサーボモーター初心者さんの参考になれば幸いです。Servomotor Test run
概要
まずACサーボモーターを利用して何をするかと申しますと、自作フライスに取り付ける主軸スピンドルモーターに使用する予定です。当然、CNC駆動ですがパルス制御ではなく可変抵抗器を使ったスピードコントロールでアナログ的に使います。その前段階でのテスト稼働になります。
候補になるモーターは他にも三相ACモーターとインバータの組み合わせが在りますが、モーターサイズが大きくオリエンタルモーターで小型なACモーターを選定してもパワー不足が否めないので不向きと考えました。なので中古で比較的安く型落ちが購入できるサーボモーターにしました。サーボモーターは小型で低振動、静音と高性能なモーターであるのでので採用するメリットは高いです。ですが、その高性能であるが為に素人には難解な設定や機器の構成が壁になります。初心者には敷居が高いです。
マニュアル類はネット上でダウンロード出来るのでダウンロードしておきます。印刷すると膨大ページ数になるので必要な所を都度印刷します。
Panasonic サーボアンプ&サーボモーター MINAS A4シリーズ
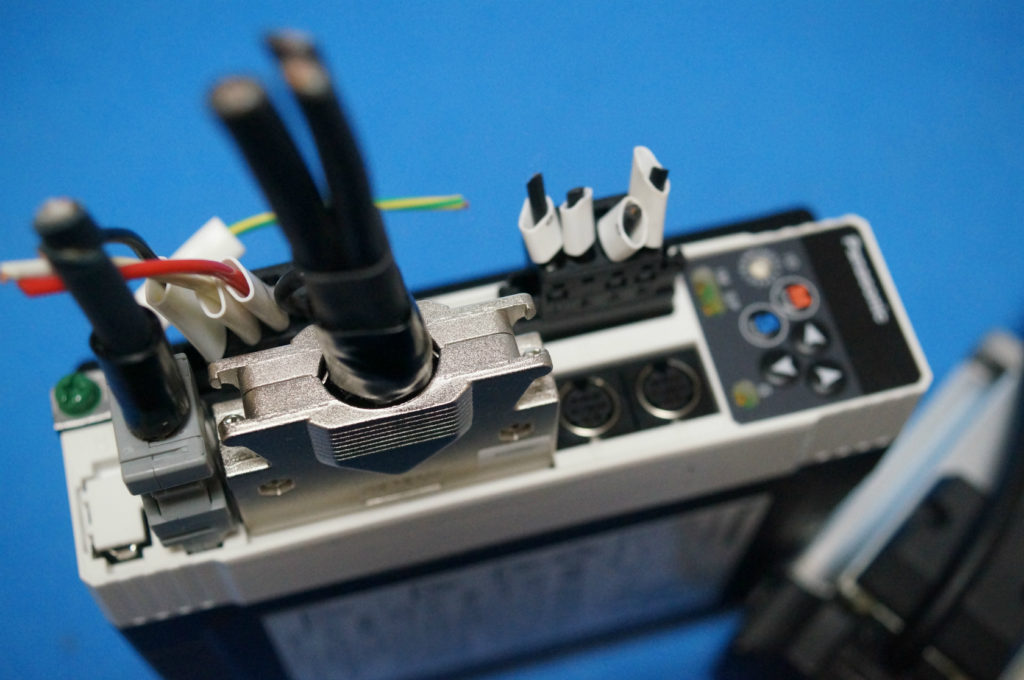
今回、初めてテストする機器は中古で購入したPanasonic サーボアンプ&サーボモーター MINAS A4シリーズです。モーターはテスト使用のみの美品を購入しました。
・Panasonic MSMD042P1S サーボモーター
定格出力 400W
定格回転速度 (r/min):3000 最高回転速度 (r/min):5000


・Panasonic MBDDT2210 サーボアンプ
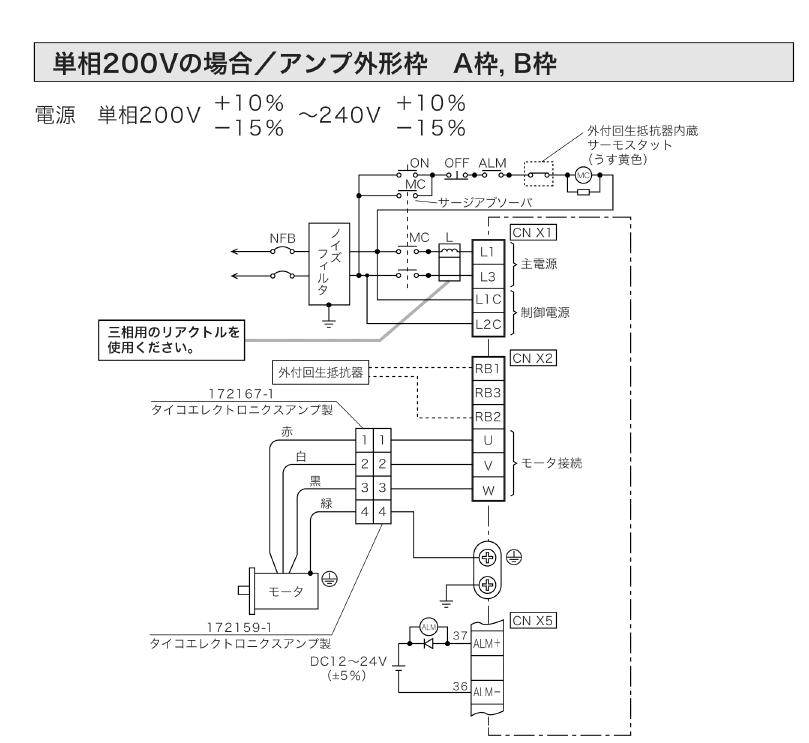
入力電源 : 主回路電源 単相 200~240V +10% -15% 50/60 Hz
入力電源 : 制御回路電源 単相 200~240V +10% -15% 50/60 Hz
エンコーダフィードバック 17 bit (131072分解能) アブソリュート/インクリメンタルエンコーダ
2500 P/r (10000分解能) インクリメンタルエンコーダ


インクリメンタルシステム (多回転データを使用しない) として使用する場合、
アブソリュートエンコーダ用電池を接続せずにご使用ください。Pr0B の設定は「1」 の出荷設定値を選択します。
単相200Vの入力で制御しますので、200Vエアコンコンセントや単相100Vからの変圧器で使用します。
動作テスト JOGモード
まず購入後の最初の動作テストとしてJOGモードを実行して動作確認を行ないます。(マニュアルP83~P84)
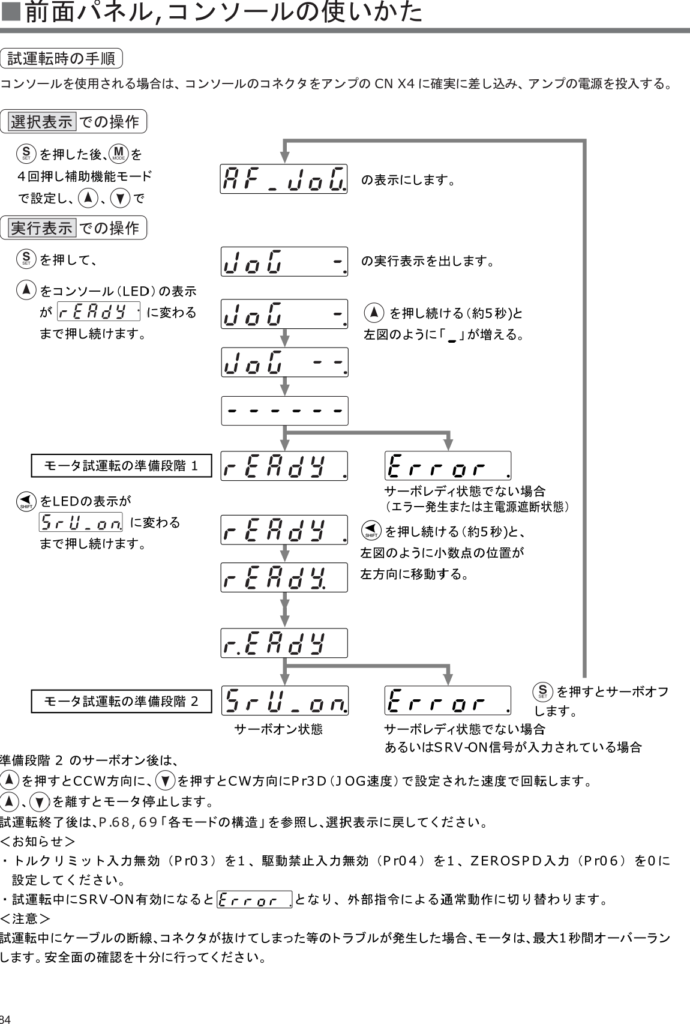
中古購入した場合は上記のJOGモードで試運転して動けば一安心です。動かない場合は壊れてる可能性も出てきます。
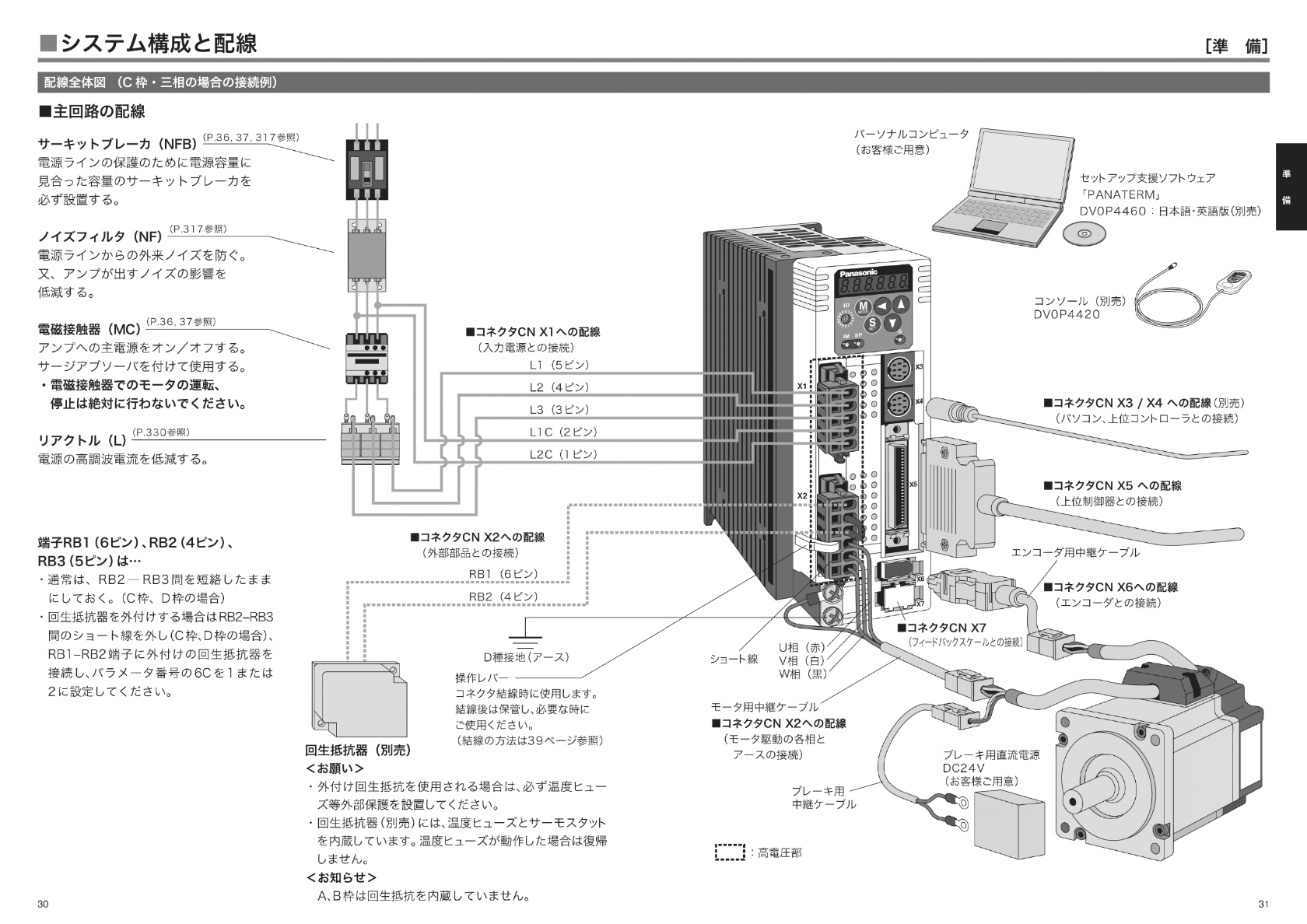
電源(単相AC 200V) テスト配線
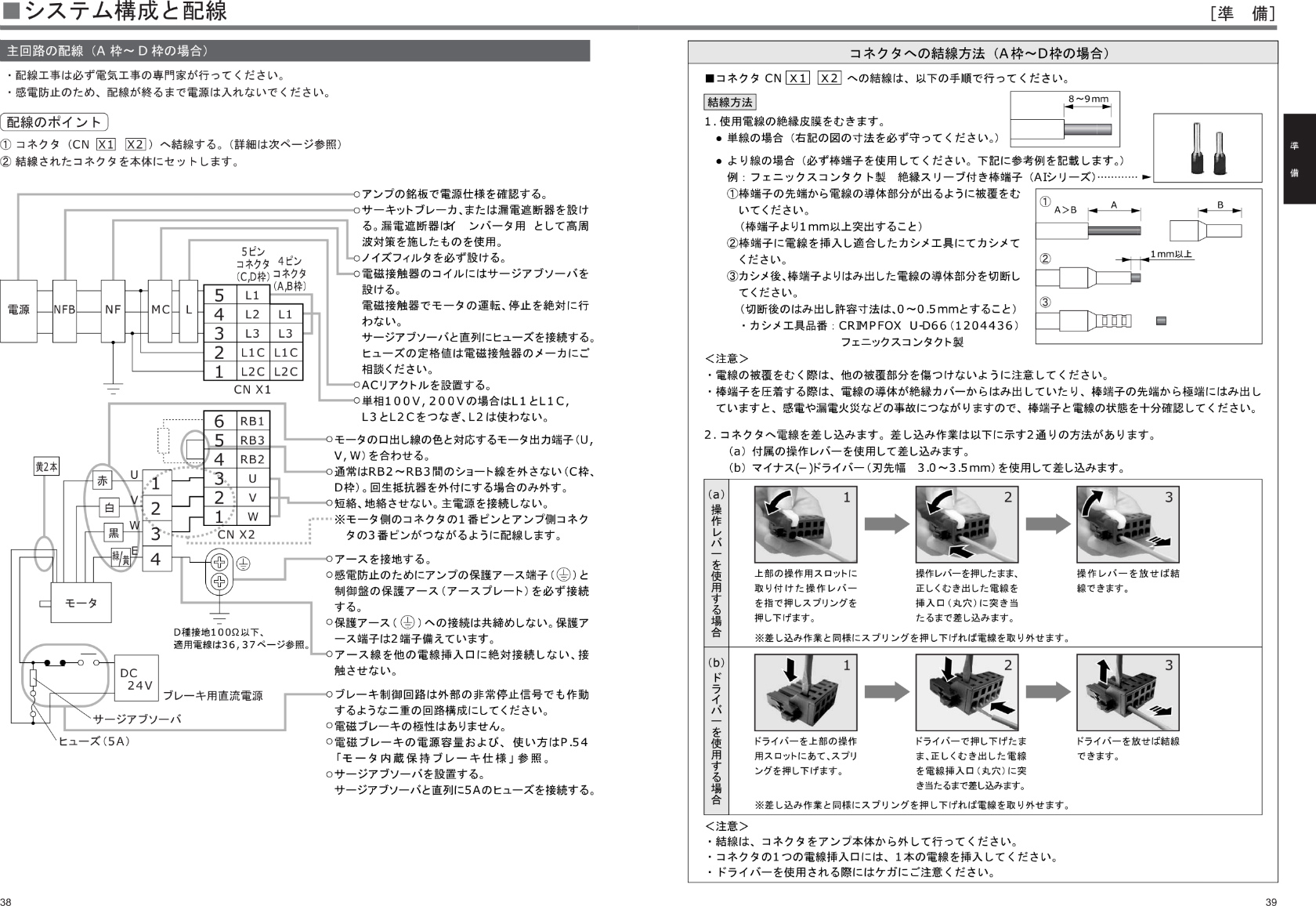
上記のJOGモードを実行する前に電源の配線とモーター&エンコーダーの接続をしなければなりません。配線はマニュアルの配線図を参考に仮配線していきます。
電気配線は電気工事士の資格が必要です。
中古のアンプには電源プラグが欠品している場合があるがAliExpressでも売っています。 電源プラグ: 04JFAT-SAXGF、06JFAT-SAXGF
上記配線図を参考に配線していきます。
配線&制御盤仮作製工程
それでは当方が実際に実行した配線手順をご紹介します。
今回購入した中古品は接続端子が全て揃っているのでそれを再利用します。接続端子が無い物を購入すると別途に購入しなければならず余計なお金が掛かってしまいます。
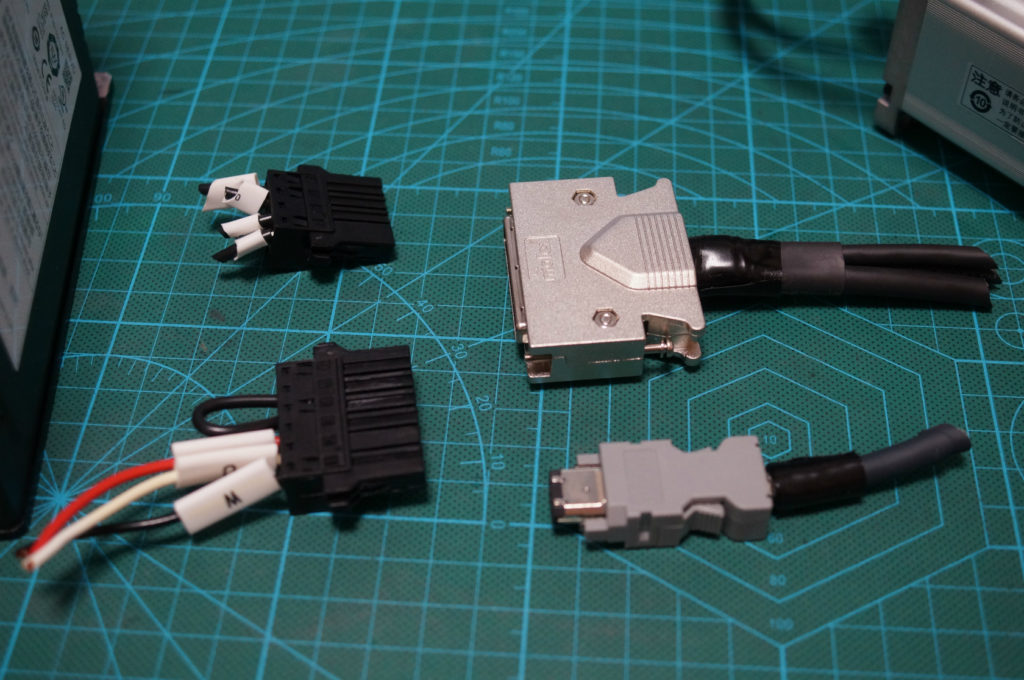
コネクターは全部で4種類でそれぞれ重要です。
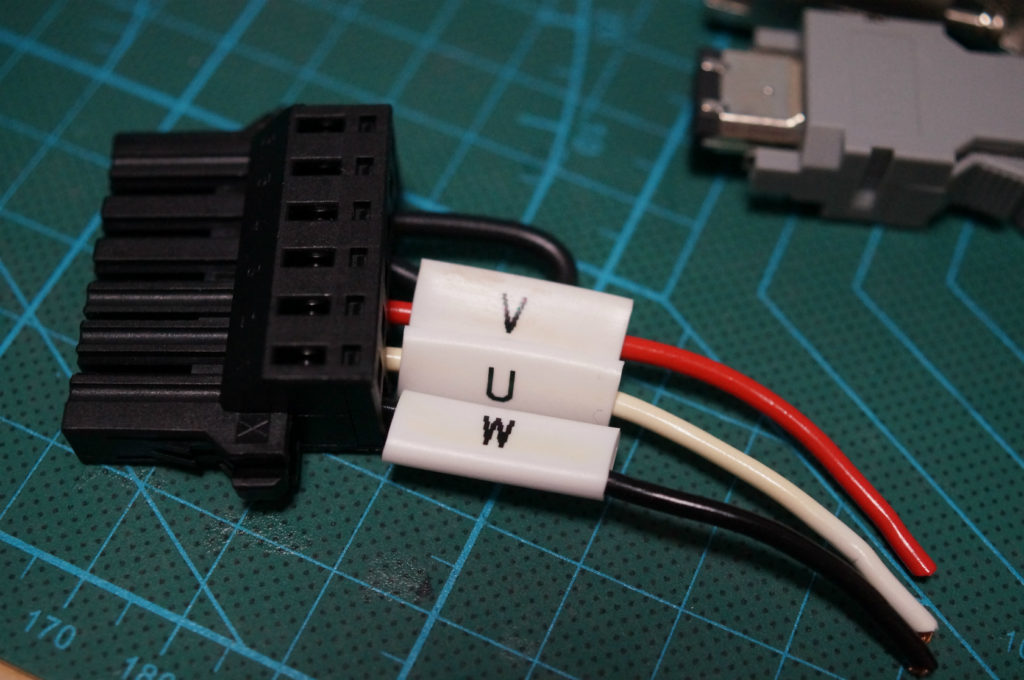
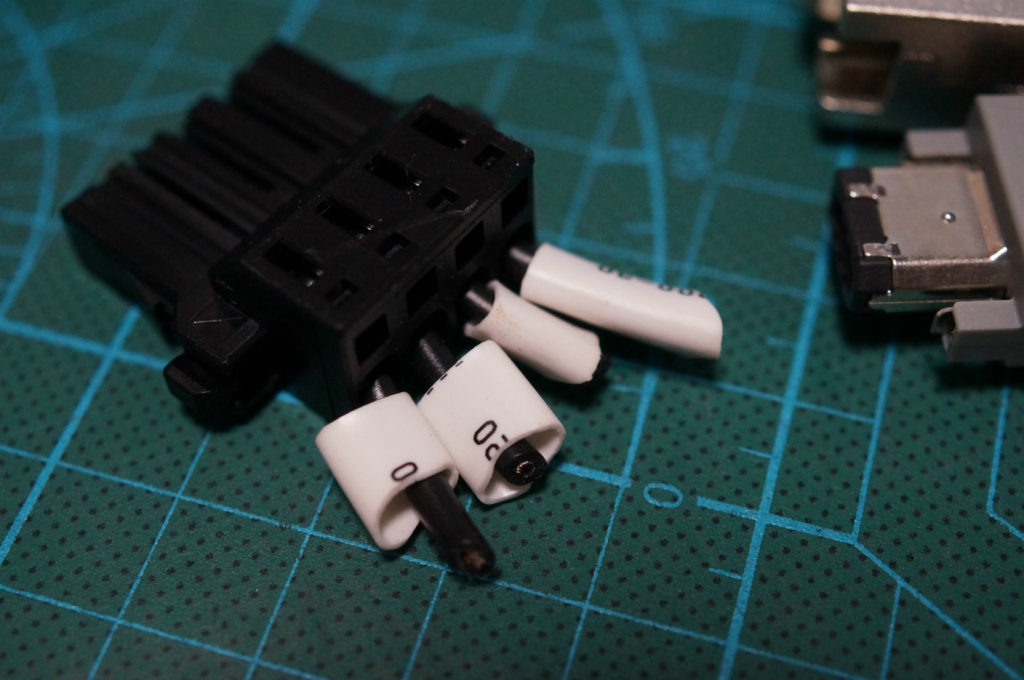
これはモーターのCN X1電源コネクター6ピンです。4番と5番はデフォルトで短絡してあります。
これはCN X2サーボアンプ入力の電源4ピン。単相200Vです。アンプ本体電源と制御電源を入力します。
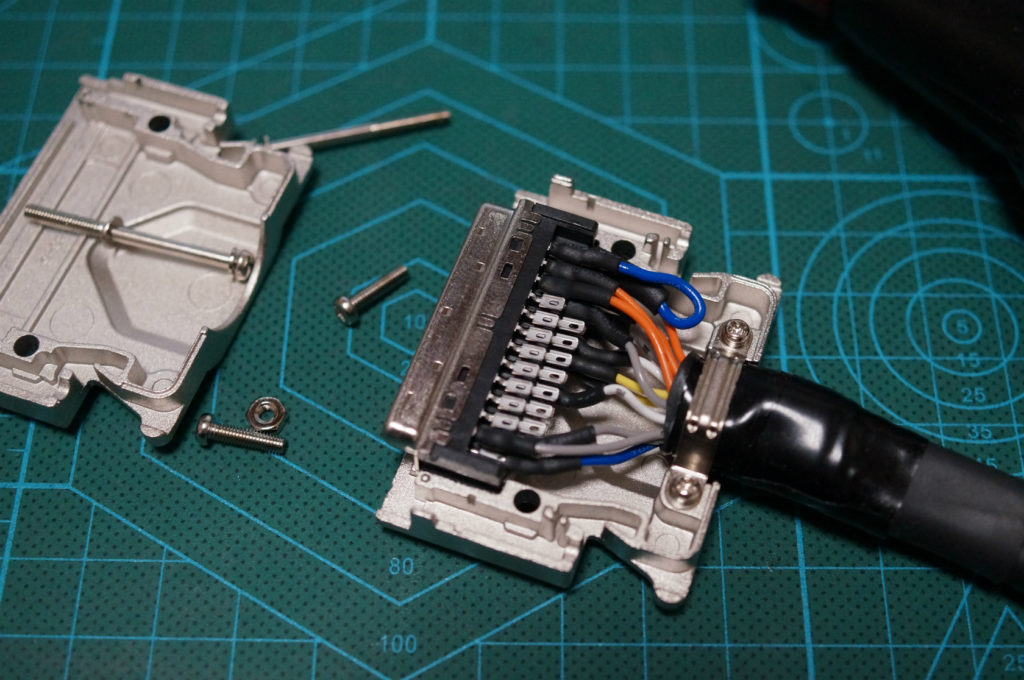
CN X6エンコーダーのコネクターです。5本の線を結線します。規格はIEEE1394 (6ピンタイプ)でモレックス社の汎用品です。(アイトリプルイーいちさんきゅうよん)
SCSI コネクタ I/O 制御コネクタ50ピン モレックス品番:54306-5011 です。
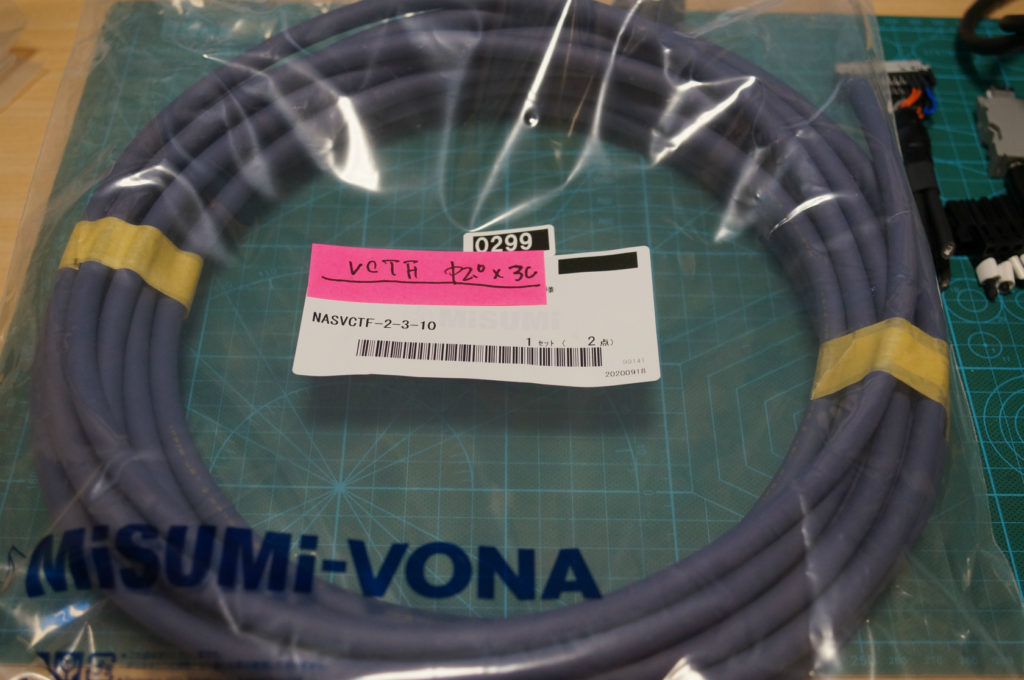
まずは単相200Vの電源ラインの製作です。用意したケーブルはVCTF2.0×3Cです。
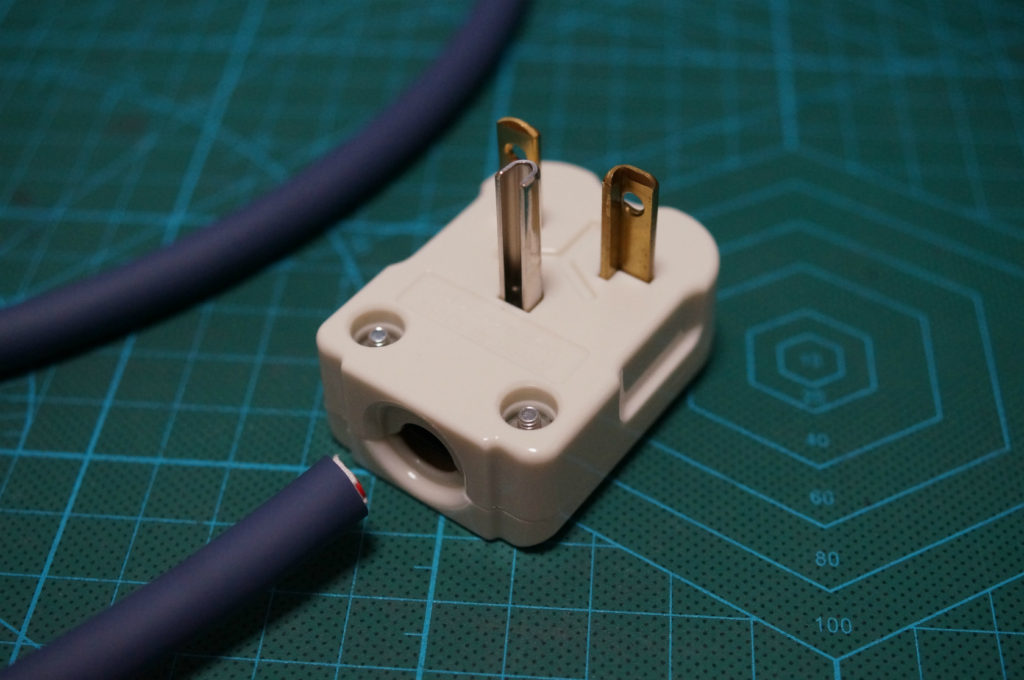
電源コンセントプラグはエアコン等に使われているコンセントプラグを使用しました。
パナソニック(Panasonic)プラグ形状 接地2P 20A 250V、定格電圧 250V 品番:WF5324
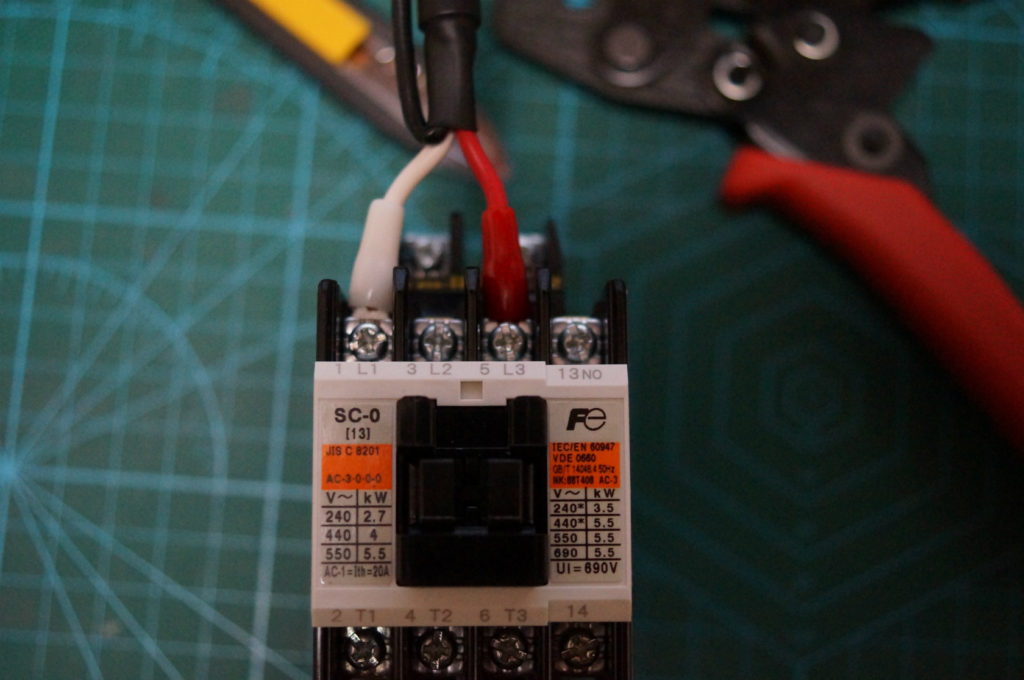
サーボモーター制御を構築するに辺りの今回、当方は初めて電磁接触器(SC-0)を購入しました。初めて取り扱う機器なので配線図を参考に結線しました。
テスト配線なので適当な電線(VVF)を使っています。

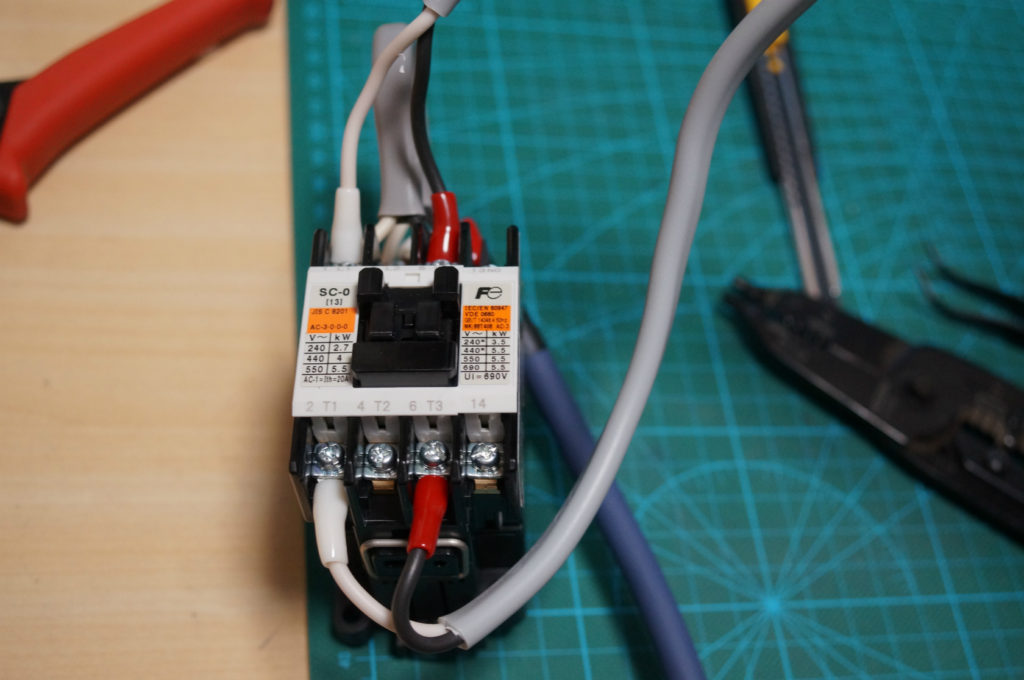
主電源と制御電源をINします。

上記写真ので電源は完成です。続きましてモーターをサーボアンプに接続します。
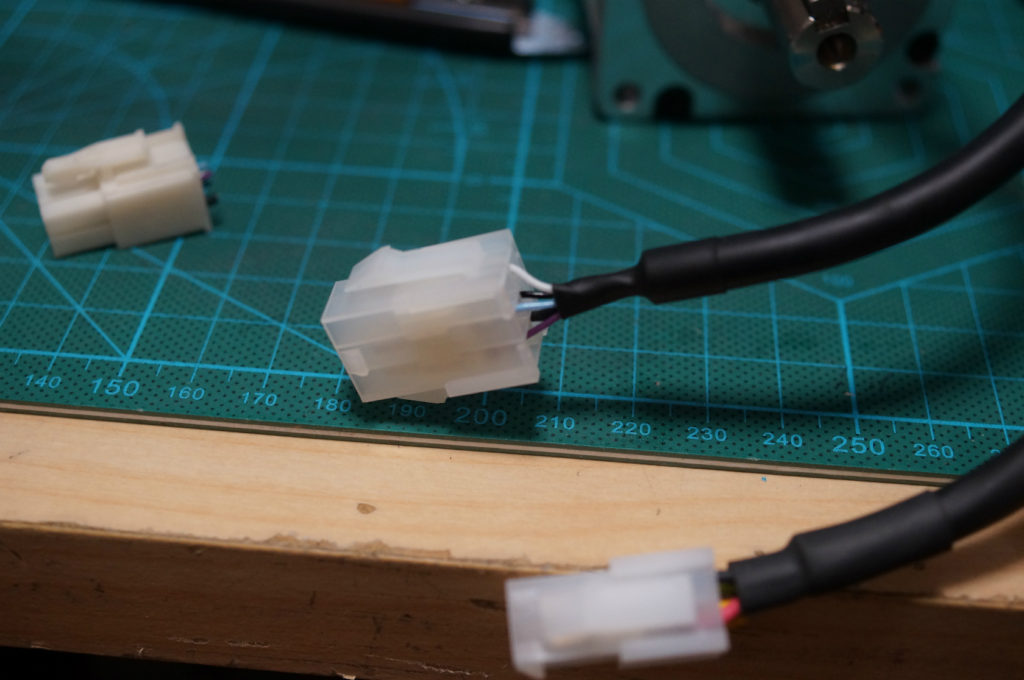
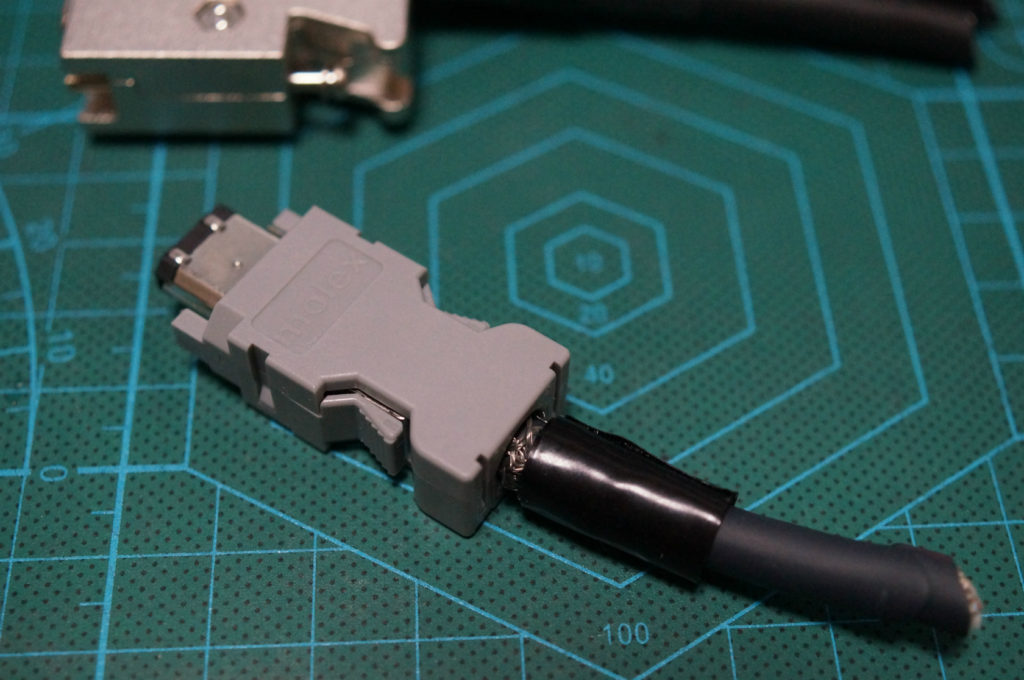
モーター側のコネクターも新しいモレックスコネクターに交換しました。電源4Pとエンコーダ6Pです。
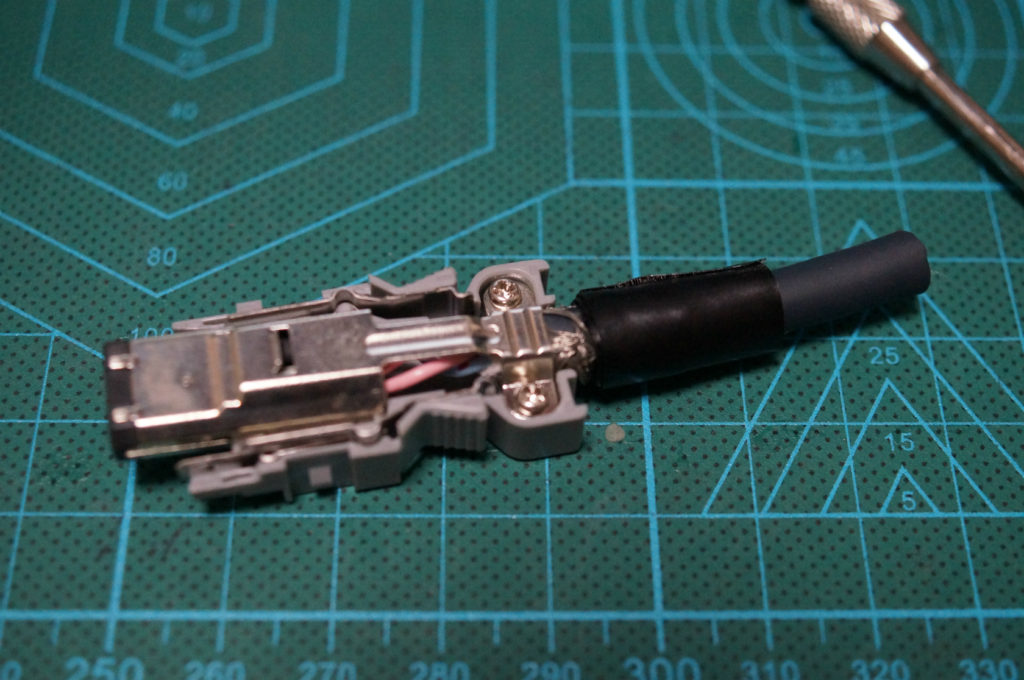
カットされているケーブルがギリギリ再利用できる長さだったのでIEEE1394 (6ピンタイプ)側は弄らず切断側をモレックスコネクターを取り付けました。
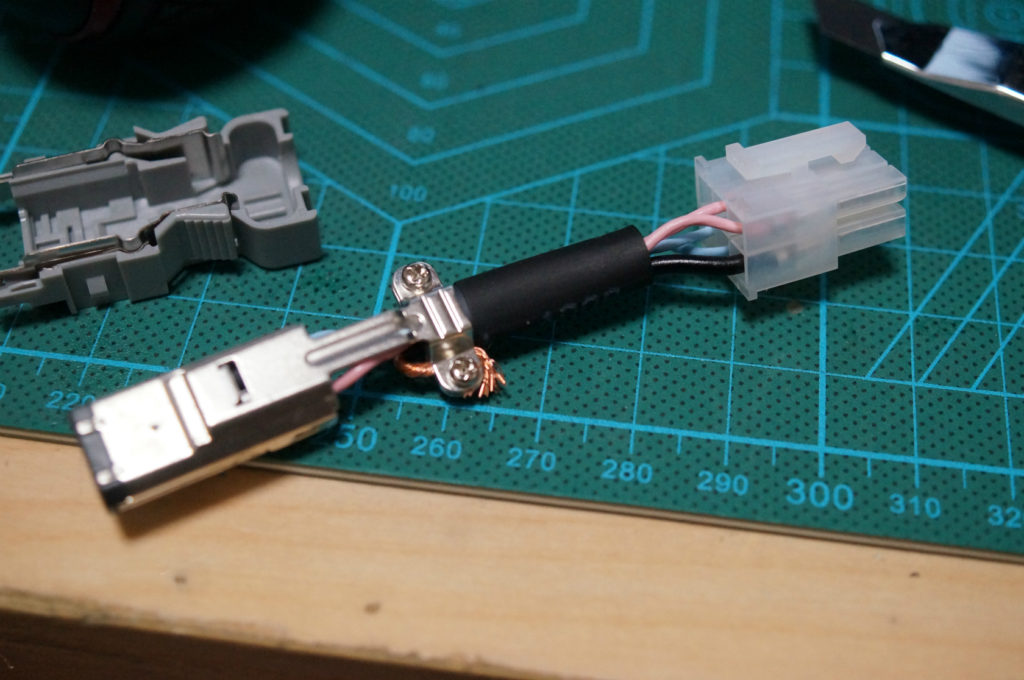
絶縁チューブで端部を処理しました。
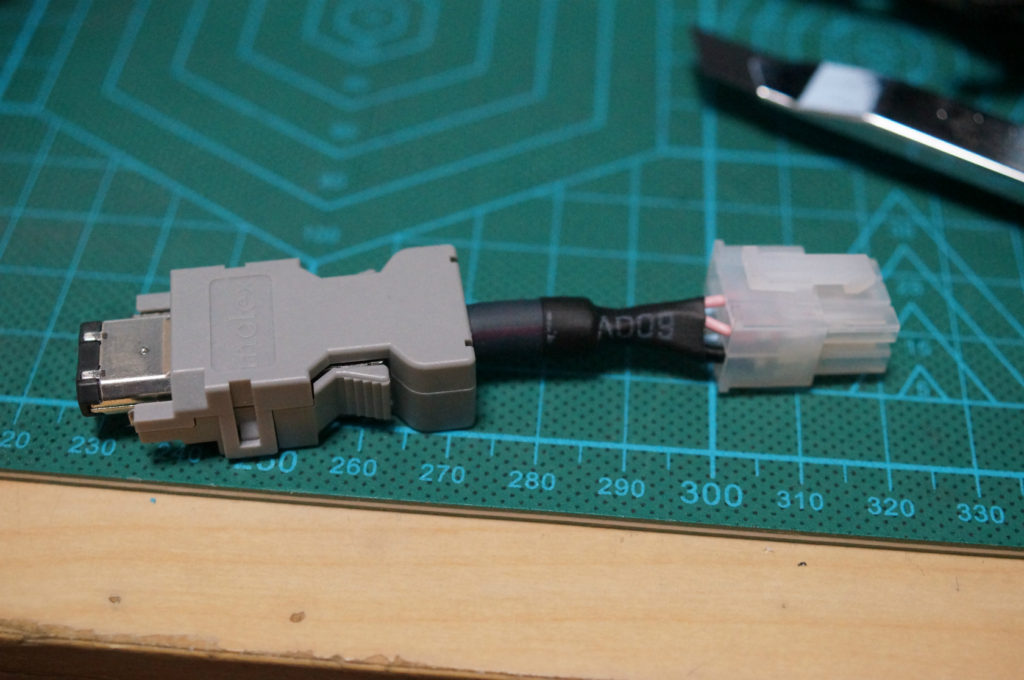
エンコーダケーブル完成!
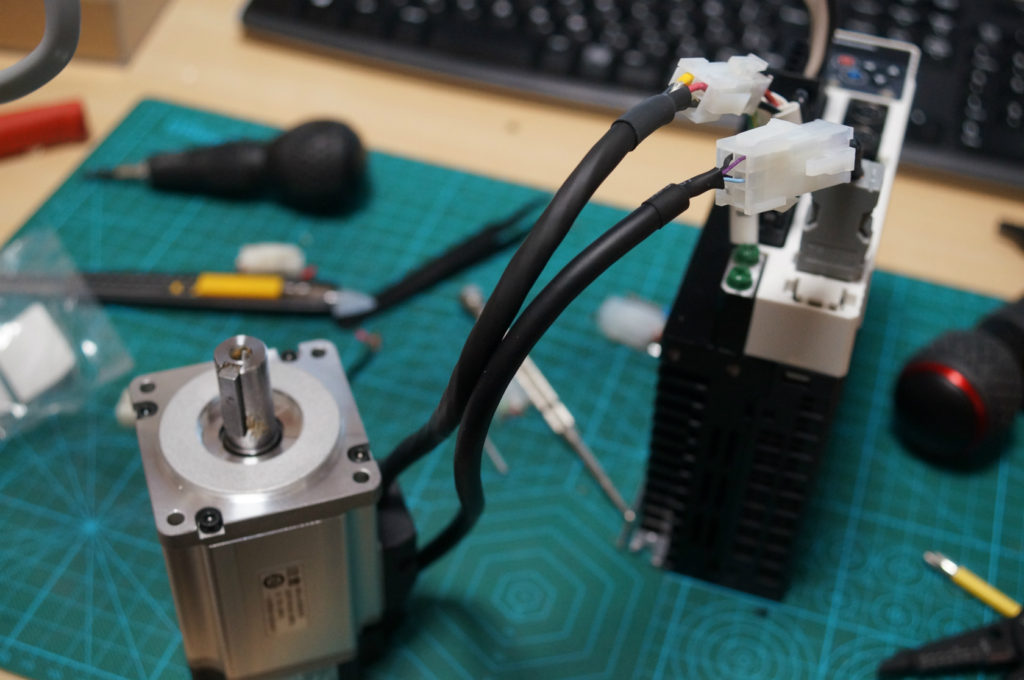
アンプとモーターが近く大丈夫か分かりませんが接続してみます。

再度、配線を確認をして電源コードを差し込みます。電源を入れてエラーが出なければ成功です。エンコーダケーブルも外れてるとエラーが出ます。ここまでやったらJOGモードを実行し動作確認をします。
とりあえず無事にJOGモードで動いたので本格的に制御盤を製作していきます。
アナログ制御部品の接続&制御盤の製作
アナログ制御の為に電子部品を用意します。それと制御盤(ケースBox)として適度な大きさの中古PCケースを用意しました。
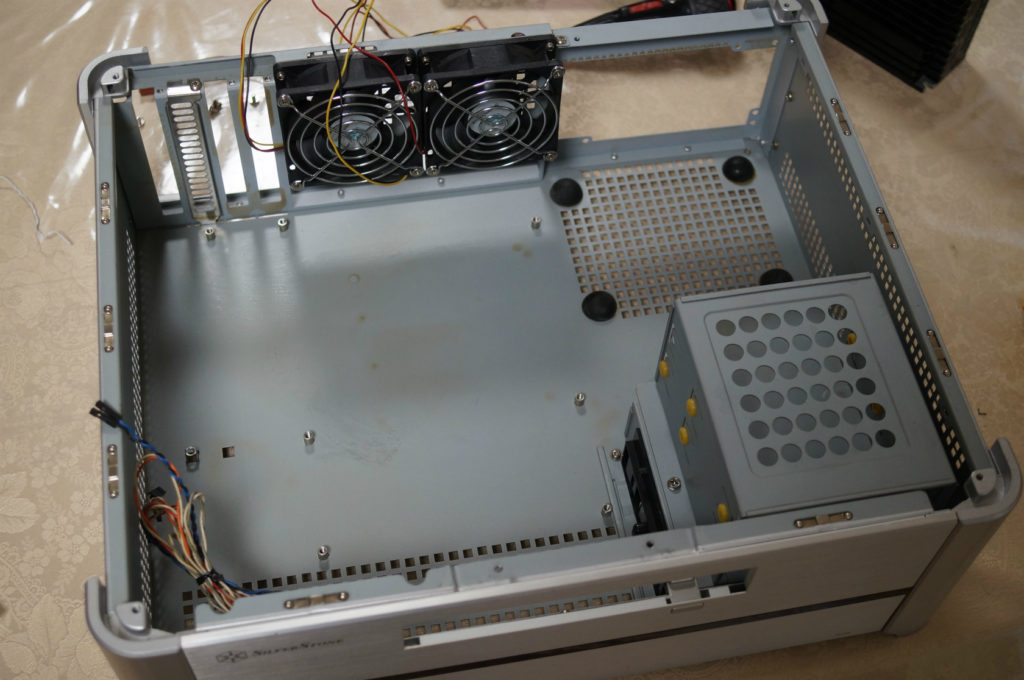
不要な物を取り除いて使用します。
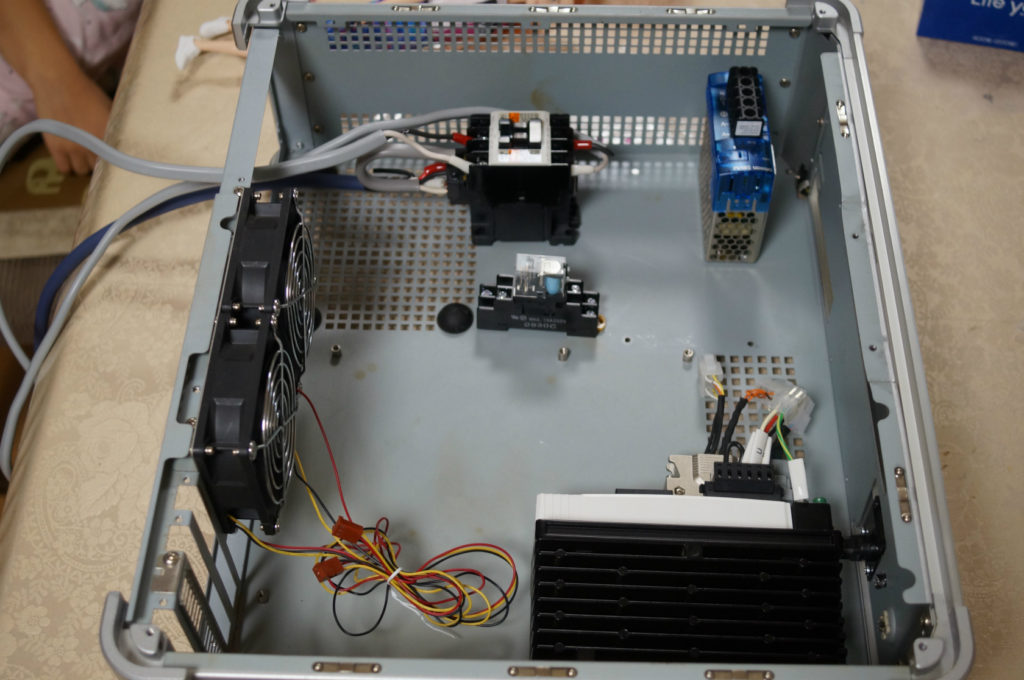
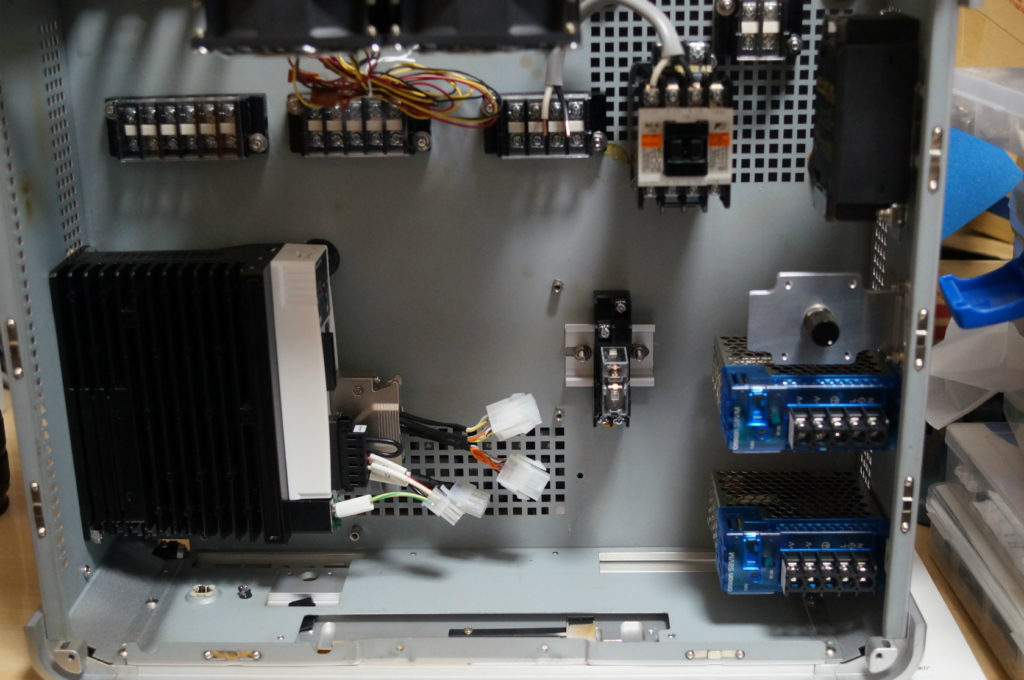
なるべく電源とアンプ離して設置しました。限られたスペースなので電源ノイズがアンプにどれだけ影響するのか未知数です。
ボルトでそれぞれの機器を固定します。意外とドリルで穴あけするのも時間が掛かります。

・ノイズフィルタ ミスミ ENF-SNT-6D DINレール取付
写真には有りませんが200Vの電源もノイズフィルターが変圧器を経由して入っています。
・可変抵抗器(ボリューム VR) 東京コスモス電機 RV30YN20S B102
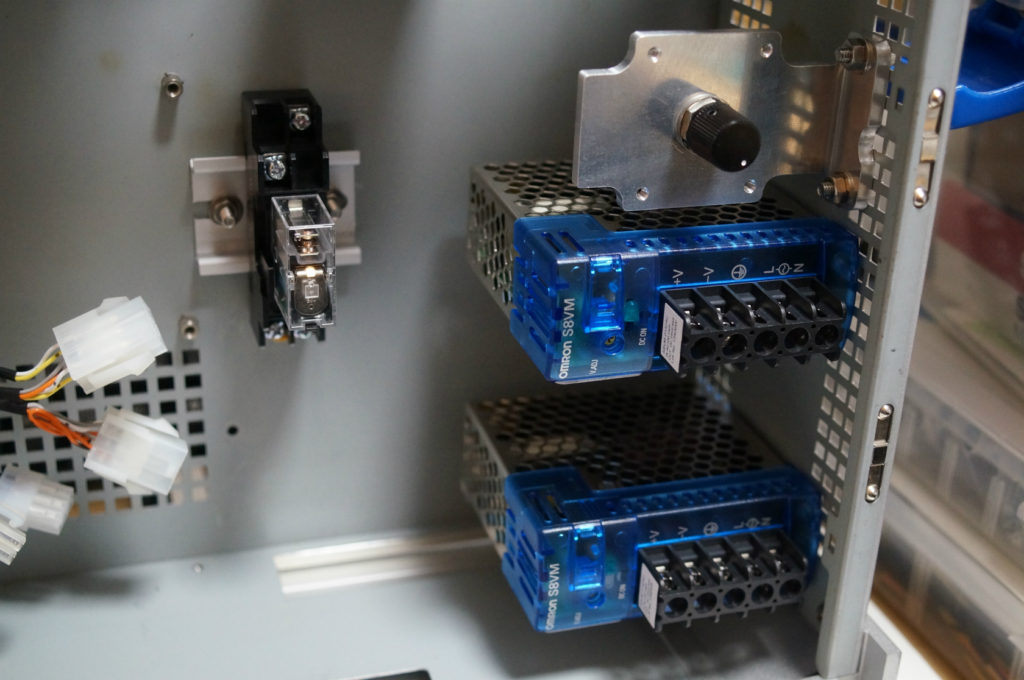
上部電源が電源本体の出力電圧調整器(V.ADJ)にて最小調整17Vで出力し可変抵抗器(ボリューム VR)で出力10Vに調整。この10Vをさらに可変抵抗器(ボリューム VR)にて0V~+10Vでコントロールし速度調整(アナログ入力)をします。要するに可変抵抗器(ボリューム VR)を直列に2個使用しています。
下部の電源は制御に使用する為の24V電源。アンプの制御入力と自己保持回路のリレーに使用します。
Part2へ続く
にほんブログ村


コメント